PID 시스템에 대해 말해 보십시오.
[P : 비례제어 / I : 적분제어 / D : 미분제어]
여기서 비례, 적분, 미분 이란 것은 에러 값(내가 원하는 제어 목표와 실제 제어 상태)에 대한 비례, 적분, 미분을 의미한다. PID제어는 모터의 속도/위치 제어, 보일러의 온도 제어 등 여러 가지 분야에서 쓰일 수 있기 때문에 에러 값이라 하면 모터의 속도라거나, 보일러에서 끓는 물의 온도 등등이 된다. 그 에러 값 들은 제어 회로의 구성에 따라 전압의 아날로그 값이 되거나, 시간 간격에 따른 펄스의 개수, 혹은 펄스의 길이 이런 다양한 값이 될 수 있다. 이런 에러 값을 받아들여서 P, I, D 라는 방법을 활용하여 제어를 하게 된다.
[P 제어]
: 비례(Proportinal)제어. 에러 값에 비례해서 제어량을 변화시키는 방법이다.
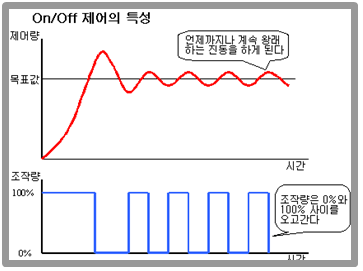
비례제어의 특성 중 하나는 정상상태 오차(Steady State Error)가 없어지지 않는다는 것이다. On/Off 제어를 비례제어인데 Gain(에러 값에 대한 제어 량의 기준 값)이 무척 큰 것이라고 생각하면 일정 크기의 에러가 계속 존재하게 된다. 게인을 줄인다고 해도 그 에러는 계속 존재한다. 예를 들어 10의 오차가 있을 때 게인 값을 적용하면 -1의 오차가 남는다면(오버되는 경우 )다시 -1의 오차를 보정하면 +0.1의 오차가 남게 되고 반복하게 된다.
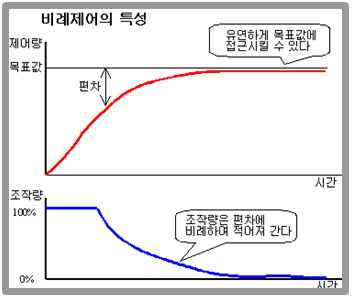
다만 게인이 일정 값 이하로 줄어들면 아래 그림처럼 약간의 편차가 계속 남은 채로 목표값을 따라가게 된다. 예를 들어 속도의 오차가 10이고, P제어를 적용하면 9의 오차를 줄일 수 있다고 하자. 그러면 1의 오차가 남는다. 그러나 다시 P제어를 하면 0.9의 오차를 줄이고 0.1에서는 0.09........0.01의 오차에서 0.009 이런 식으로 오차가 계속 남게 된다.
[I 제어]
: 에러 값을 적분한 값을 가지고 제어를 하는 경우.
위에서 비례 제어의 특성 그래프를 보면 일정 크기의 정상상태 오차가 계속 남아있게 된다. 이는 P제어로는 처리 할 수 없는 작은 오차(잔류편차)이므로 P제어만으로는 없앨 수가 없다. 즉 이런 미소한 잔류편차를 시간단위로 적분하여 그 값이 어떤 크기가 되면 조작량을 증가시켜 편차를 없애는 방식이 I 제어이다.
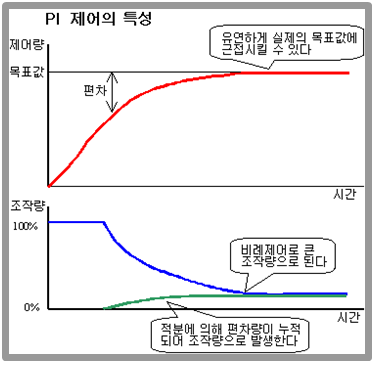
위 그림을 보면 파란선은 P제어에 의한 조작량이고, 녹색선이 I 제어에 의한 조작량이다. 그림을 보면 I 제어는 일정 시간 동안 오차가 누적되어 일정 값을 넘어서면 시작하게 된다.
[D 제어]
: 미분, 즉 오차 값의 변화를 보고 조작량을 결정하는 방법
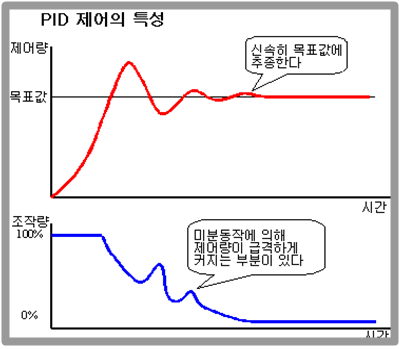
위 그림은 PID 제어에 대한 그림이다. D제어만 따로 놓고 보기는 좀 힘들기 때문에 PID 제어를 통틀어서 본다. D제어는 오차의 변화의 반대방향으로 제어가 이루어지게 된다. 즉 오차의 값을 미분한(즉 빨간선의 기울기)의 반대방향으로 조작량을 변화시킨다. 그렇기 때문에 빨간선과 파란선을 비교하면 서로 반대의 모양으로 급격하게 조작량이 변하는 것을 볼 수 있다.
커뮤니티 Q&A
위 이론과 관련된 게시글이에요.
이해가 안 되거나 궁금한 점이 있다면 커뮤니티에 질문해 보세요!
게시글 작성하기