제어시스템의 안정도에 대해 설명해보세요.
(1) 공칭안정도(nominal stability)
- 수학적 모델에 대한 안정도 평가
․ 특성방정식의 근을 조사 : 시스템의 모든 극점의 실수값이 음수
․ Routh 안정도 판별법 : 특성방정식의 계수로 판별
․ Nyquist 안정도 판별법 : 개루프 시스템의Nyquist 선도로부터 폐루프
- 시스템의 안정도 평가
․ 근궤적법 : 시스템 파라미터 변화에 따른 폐루프 시스템의 안정도 평가
(2) 상대안정도(relative stability)
․ 모델의 불확실성에 대한 안정도-강인성 문제
․ Nyquist 궤적
- 게인여유(gain margin,
공칭 폐루프 시스템이 불안정한 경계에 이를 때까지 추가될 수 있는 게인의 여유를 나타내는 지수 (바림직한 값 : 2 ~ 10)
- 위상여유(phase margin,
공칭 폐루프 시스템이 불안정한 경계에 이를 때까지 추가될 수 있는 위상지연에 대한 여유를 나타내는 지수 (바람직한 값 : 30° ~ 60°)
여기서,
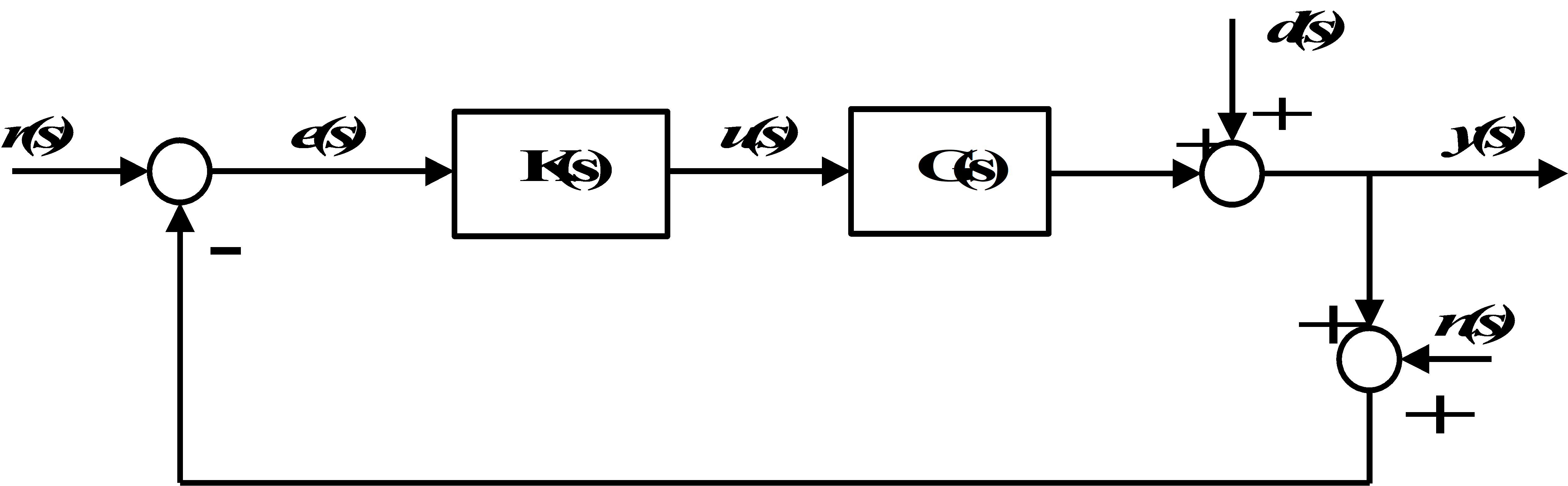
(3) 피드백 제어시스템의 기본 용어
(4) 제어시스템의 응용분야
가. 미사일 발사대 위치제어시스템
미사일 발사대의 자동위치 제어시스템
포텐쇼미터 R1, R2에 의한 편차로 발사대의 요구위치 조정
나. 속도 제어시스템
J. Watt가 개발한 증기기관의 속도 제어시스템
흡입증기량의 조절로 증기기관의 속도 제어
다. 압력 제어시스템
용광로 내의 압력을 조절판의 위치로 제어
라. 전기식 유압 제어시스템
항공기의 조종익이 조종사의 요구에 따라 정확한 위치로 제어
마. 화학공정 제어시스템
화학성분을 자동으로 조정해 주는 제어시스템
바. 핵반응 제어시스템
제어봉의 조절로 중성자수를 조정하여 핵반응속도를 제어하는 시스템
사. 화력발전 제어시스템
다변수 제어시스템의 대표적인 예
아. 인간 제어시스템
인간, 기계의 복합시스템인 자동차 운전시스템과 인공손
자. 경제계의 제어시스템
제어는 창고의 물품 재고관리 및 국가의 수입을 유지관리 등 경제계에 응용
커뮤니티 Q&A
위 이론과 관련된 게시글이에요.
이해가 안 되거나 궁금한 점이 있다면 커뮤니티에 질문해 보세요!
게시글 작성하기